




BUSINESS
용접로봇제어 SW 설계 및 제작
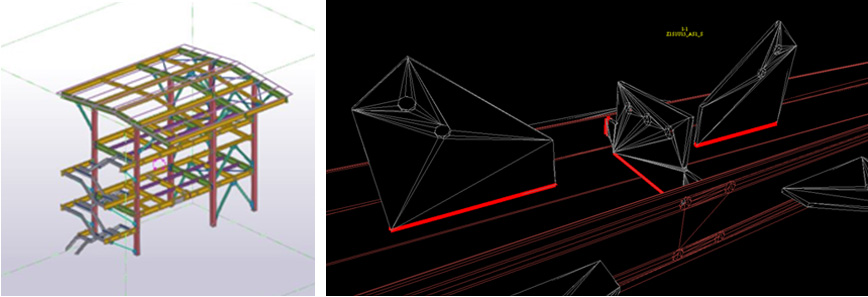
- 3D 모델 분석을 통한 용접로봇 제어 솔루션
- 3D 모델에서 부재 제원 등의 필요 정보와 용접선 정보 추출
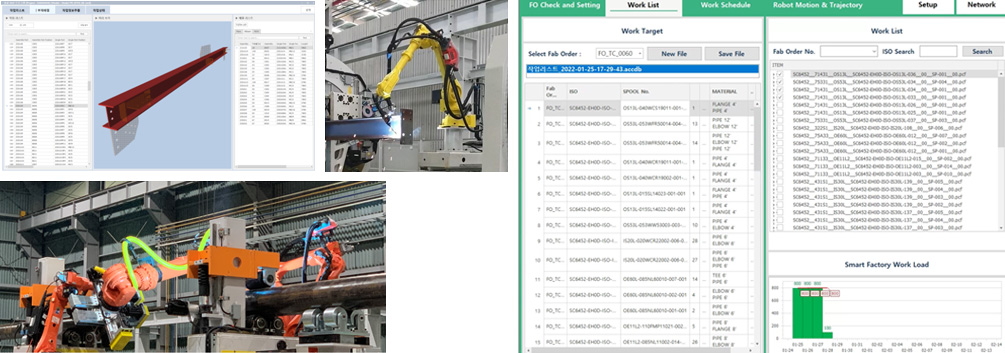
- 용접 정보를 이용하여 작업 환경에 맞는 로봇제어 명령 생성
- 작업 효율을 고려한 최적의 작업 스케줄링
- 사용자 편의성을 고려한 GUI 개발

주요 구성/기능
| 기능/성능 | 내용 |
|---|---|
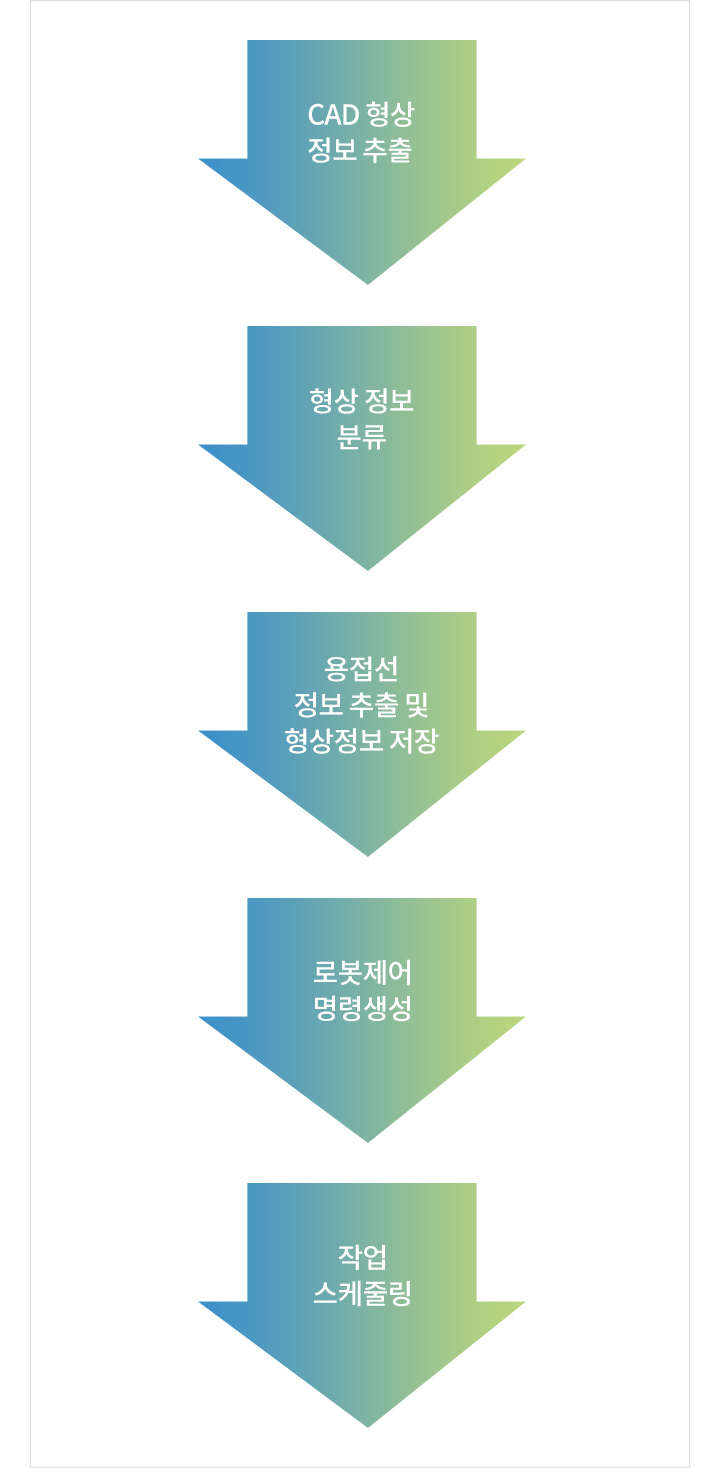
| CAD 형상 정보 추출 | CAD 프로그램 또는 Third Party S/W에서 제작된 3D 모델 파일/공간형상 파일에서 형상 정보 추출 |
| 형상 정보 분류 | 로봇이 작업 가능한 단위로 어셈블리 파트 분류 및 선별 |
| 용접선 정보 추출 | 부재와 부재 간 용접을 위한 용접선 추출 및 용접 필요 정보 추출 |
| 형상 정보 저장 | 각 부재 별로 필요 정보를 이미지와 텍스트 형태의 파일로 저장 |
| 로봇제어 명령 생성 | 작업 환경을 고려한 로봇 이동, 센싱, 용접 등의 로봇제어 명령 생성 |
| 작업 스케줄링 | 자동화 공정을 위하여 작업장 별 최적의 투입 순서 결정 |
적용 기술/도구
| 적용기술 | 적용도구 |
|---|---|
| 3D 모델/공간 형상 파일 분석 기술 | 개발 프로그램: C#, C++ 엔진: OpenInventor |
| 3D 모델/공간 형상 파일에서 제원 등의 필요 정보 추출 기술 | |
| OpenInventor을 이용한 용접정보 추출 기술 | |
| 용접정보를 적용한 로봇제어 기술 | |
| 작업 효율 극대화를 위한 스케줄 계산 기술 | |
| 사용자 편의성을 고려한 GUI 개발 기술 |
기술응용분야
- 3D 형상 가시화 프로그램
- 형상 가시화 및 MESH 정보 가시화 프로그램
- 3D 모델 분석 기능을 이용한 필요 정보 추출 프로그램
- 작업 환경/로봇에 맞춘 정보 제작 및 전달 프로그램
- 작업 환경을 고려한 로봇제어 명령 생성 프로그램